DENSO - RC8A IT-ROB-DEN-2018-00001
Masz dodatkowe pytania? Skontaktuj się z nami!

Borja Garcia
+34 679 019 350
b.garcia@gindumac.com
- GINDUMAC
- Produkty
- Wyposażenie automatyki
- Używany DENSO RC8A - 2018 - Robot na sprzedaż | gindumac.com
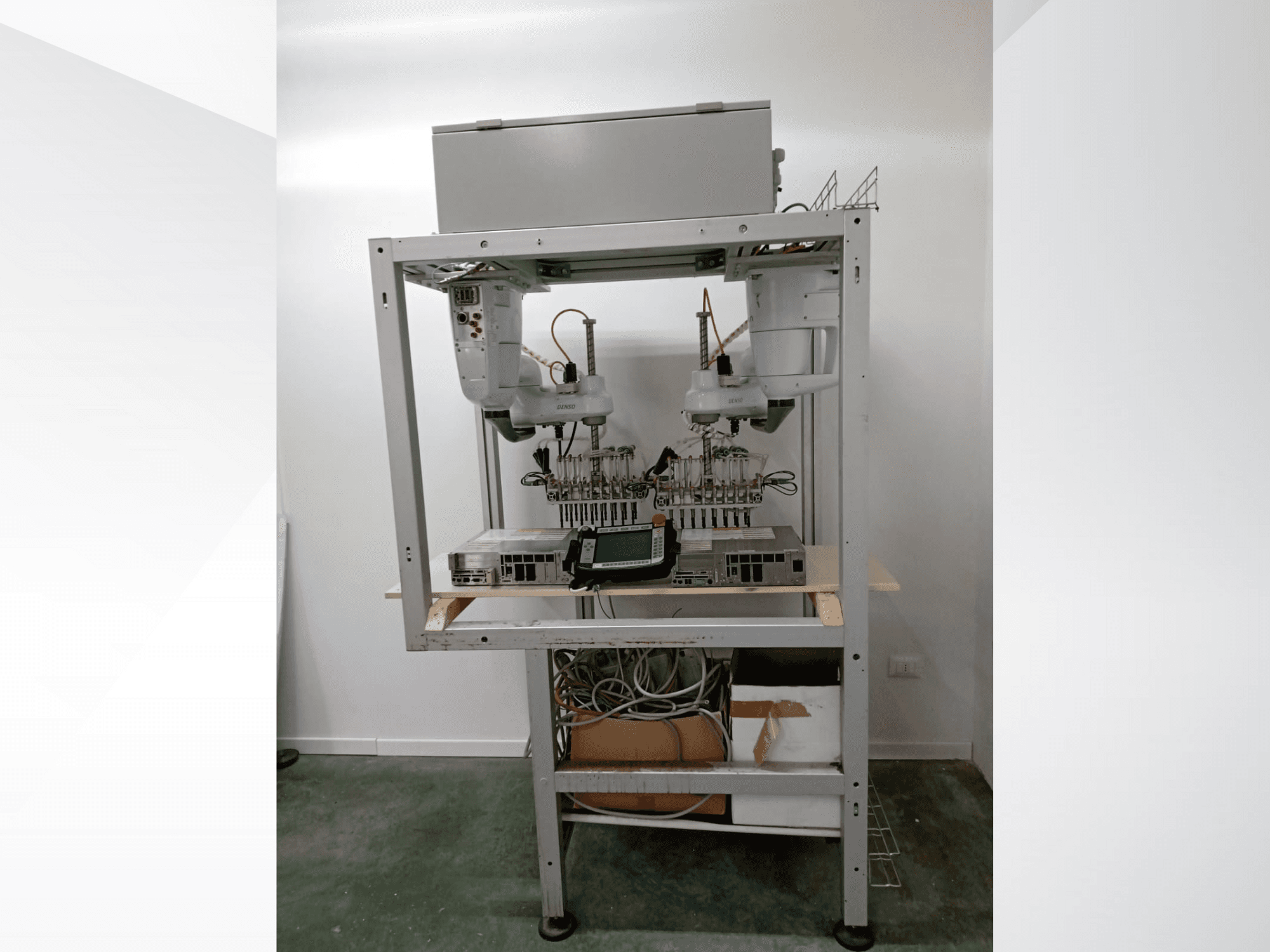
Ten model DENSO RC8A został wyprodukowany w 2018 roku. Posiada celę zrobotyzowaną z dwoma robotami SCARA, z których każdy może osiągnąć maksymalny zasięg 550 mm i skok w osi Z wynoszący 320 mm. System obejmuje kontroler RC8A, oprogramowanie do programowania offline i funkcje autodiagnostyczne. Idealny do zastosowań wymagających szybkiej manipulacji zrobotyzowanej. Skontaktuj się z nami, aby uzyskać więcej informacji na temat tej maszyny.
Informacje o maszynie
- marka: DENSO
- rok: 2018
- MODEL: RC8A
- zastosowanie: Robotyka
- Lokalizacja: Włochy
- rodzaj maszyny: Ramię robota
Informacje dodatkowe
Motion & Control:
System sterowania punkt-punkt
Ruch liniowy i kołowy w 3 wymiarach
Pojemność pamięci:
Pamięć zmiennych: 1,75 MB (ok. 65000 punktów)
Pamięć programu: 400 MB
Do 256 programów
5000 instrukcji na program
Sygnały I/O:
Wejścia:
8 wejść użytkownika na nadgarstku robota (Hand I/O)
8 wejść użytkownika na kontrolerze (Mini I/O)
8 wejść systemowych
Wyjścia:
8 wyjść użytkownika na nadgarstku robota (Hand I/O)
7 wyjść użytkownika na kontrolerze (Mini I/O)
8 wyjść systemowych
Interfejsy komunikacyjne:
1 × RS-232C
Gigabit Ethernet
2 × USB
Dodatkowe funkcje:
Funkcje autodiagnostyczne
Warunki pracy:
Temperatura: 0-40 °C
Wilgotność: ≤ 90% RH
Wymiary i waga kontrolera:
Standardowy RC8A: 357 × 320 × 94 mm
RC8A z funkcją Safety Motion: 411 × 320 × 94 mm
Pojemność: 12,4 litra
Waga: 12 kg
Kable:
Kabel zasilający: 5 m
Kabel I/O: 8 m (opcjonalnie)
Teaching Pendant:
Ilość: 1 sztuka (dla obu robotów)
Długość kabla: 4 m (opcjonalnie 8 m / 12 m)
Wyświetlacz:
7,5-calowy ekran dotykowy TFT LCD
Rozdzielczość: 640 × 480 pikseli
Zasilanie: 24 V
Stopień ochrony: IP65 (odporna na kurz i zachlapania)
Wymiary: 290 × 198 × 80 mm
Waga: około 1 kg
Funkcje:
Tworzenie i edycja programów
Konfiguracja parametrów
Jogging robota i sterowanie ruchem
Uruchamianie programu
Tryb uczenia i weryfikacji
Zarządzanie wejściami/wyjściami
Konfiguracja komunikacji
Wyświetlanie błędów
Roboty
Ilość: 2 jednostki
Typ: SCARA
Charakterystyka mechaniczna:
Maksymalny zasięg: 550 mm
Skok osi Z: 320 mm
Powtarzalność (J1 + J2): ±0,012 mm
Powtarzalność (oś Z): ±0,01 mm
Powtarzalność (oś T): ±0.004°
Udźwig (nadgarstek): 8 kg
Prędkość
Maksymalna prędkość kompozytu: 8780 mm/s
Prędkość w osi Z: 2760 mm/s
Prędkość osi T: 220°/s
Połączenia ramienia robota
Połączenia pneumatyczne:
4 przewody pneumatyczne, Ø 6 mm
Sygnały elektryczne:
24 sygnały przez złącze
Cechy robota
Oprogramowanie do programowania offline
Enkodery absolutne
Uszczelnione serwomotory AC, bezszczotkowe i bezobsługowe
Zasilanie: Jednofazowe lub trójfazowe 230 V
Wyposażenie dodatkowe
2 urządzenia chwytające z czujnikami do wykrywania pobieranej ilości
1 elektryczna szafa sterownicza łącząca cały system
Historia maszyny
Opis funkcjonalny: Zrobotyzowana cela została pierwotnie zaprojektowana do zasilania maszyny pakującej sztućce. System pobierał ułożone widelce z dedykowanych skrzynek i przenosił je na przenośnik pakujący z prędkością 100 sztuk na minutę. Podczas gdy dwa roboty SCARA działały poprawnie, system wymiany skrzynek (pustych i pełnych) nie był optymalnie zaprojektowany. Z tego powodu zrobotyzowana cela została ostatecznie wycofana z eksploatacji. Dostępny jest krótki film przedstawiający robota podczas pracy.
*Mogą występować różnice pomiędzy podanymi danymi a rzeczywistymi wartościami, należy to potwierdzić u przedstawiciela handlowego.
Borja Garcia
Warunki płatności
Płatność z góry
Finansowanie aktywów